
Modern İmalat Sistemleri Tasarım ve Planlama Çalışmaları TOBB ETÜ’de
9 YIL ÖNCE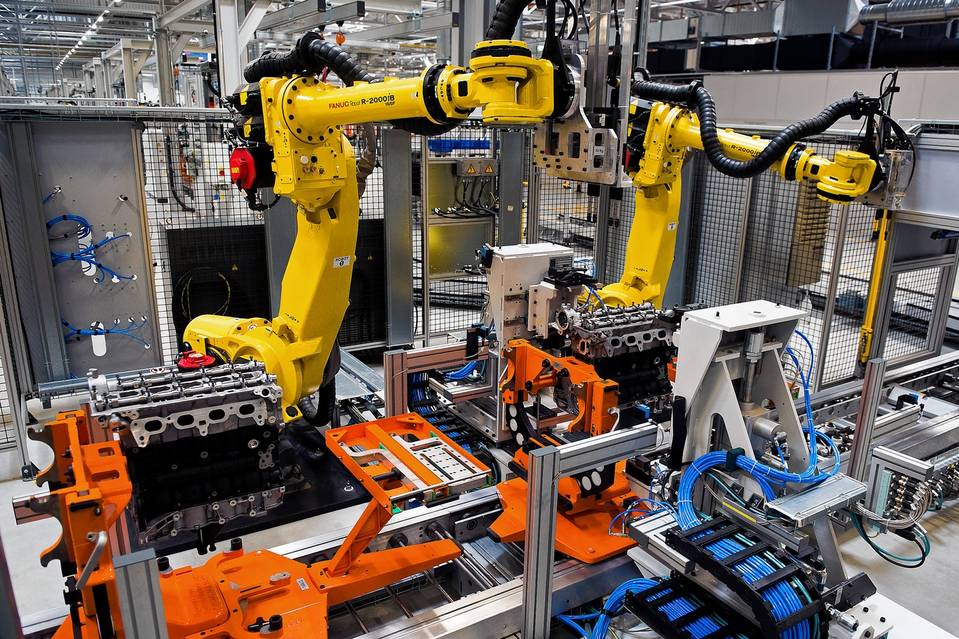
Bilgisayar teknolojisinin çok hızlı bir şekilde gelişmesi sonucu artan işlem ve bellek kapasitelerine paralel olarak internet teknolojilerinde yaşanan hızlı gelişmeler üretimde bilgisayarların kullanımını çok hızlı bir şekilde artırmıştır. Bunun sonucu olarak ilk etapta makinelerin bilgisayarlarla yerel olarak kontrolü sağlanmış ve CNC (Computer Numeric Control) makineler ortaya çıkmıştır. Fakat ilerleyen zamanlarda bilgisayar kontrollü makineleri tek bir merkezden kontrol etmek mümkün hale gelmiştir. Son zamanlarda ise, sadece makineler değil, üretimde görev alan bütün unsurların bilgisayar kontrollü hale gelmesi, bunların işleyişlerinin bir merkezden takip ve kontrol edilmesi, bütün verilerinin bir ağ üzerinden diğer unsurlarla paylaşılması ve merkezi veya dağıtık kararlar alınarak sistemin işleyişinin sağlanması mümkün hale gelmiştir. Üretimde yer alan bu unsurlara CNC makinelerinin yanında otomatik depolama, depodan çağırma (AS/RS), Otomatik Yönlendirmeli Araçlar (AGV), endüstriyel robotlar, taşıyıcı bantlar (konveyör) gibi farklı tipte malzeme elleçleme (taşıma, yükleme, boşaltma) araçları, çok çeşitli sensörler, görüntüleme araçları örnek olarak verilebilir.
Bu teknolojiler; kalite, verimlilik, üretim, esneklik, iş sağlığı ve güvenliği gibi konularda önemli faydalar sağlamaktadırlar. Fakat bu avantajları elde edebilmek için bu sistemlerin tasarımlarının uygun bir şekilde yapılarak kurulması ve sistemleri kontrol edecek optimizasyon algoritmaları geliştirilmesi gerekmektedir. Değilse, çok yüksek yatırım maliyetleri gerektiren bu sistemlerden istenen fayda sağlanamamakta ve yatırımın geri dönüş süresi çok uzamaktadır.
TOBB ETÜ’de modern imalat sistemlerinin tasarımı ve kullanımına yönelik optimizasyon çalışmaları Doç. Dr. Hakan Gültekin direktörlüğünde SMART araştırma grubu (smart.etu.edu.tr) tarafından gerçekleştirilmektedir. Araştırmalar özellikle Esnek Üretim Sistemleri (FMS) ve endüstriyel robotların malzeme elleçleyici olarak kullanıldığı Robotik Hücreler konularında yoğunlaşmıştır. Robotik hücrelerle ilgili daha fazla bilgiye http://smart.etu.edu.tr/robot/index.html adresinden ulaşılabilir.
Modern imalat sistemleriyle ilgili olarak şimdiye kadar aşağıdaki projeler tamamlanmıştır:
Esnek İşlemli Akış Tipi Sistemlerde Üretim Hızının Enbüyüklenmesi: Esnekliğin Getirisi, Matematiksel Modelleme ve Çözüm Teknikleri, TÜBİTAK Kariyer, 110M489, 2011-2013, 121.530TL.
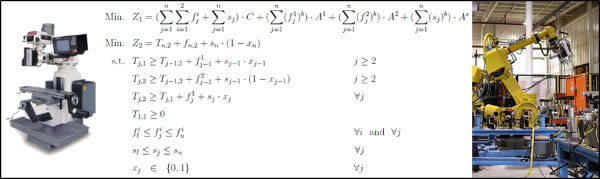
Bu çalışmada, klasik çizelgeleme ve montaj hattı dengeleme literatüründen farklı olarak, insan veya makinelerden oluşabilecek iş istasyonlarının değişik tiplerde esnekliğe sahip olduğu durumlar ele alınmıştır. Temel olarak, iş istasyonlarının değişik işlemleri gerçekleştirebilecek kabiliyette oldukları ve bu işlemlerin işlem zamanlarının kontrol edilebilir olduğu düşünülere, bu iki tip esnekliğin sisteme, üretim hızı ve üretim maliyetleri açısından getirilerinin neler olduğu araştırılmıştır. Aynı zamanda, en yüksek üretim hızı ve en düşük üretim maliyetlerini elde etmek için operasyonların makinelere atanması, parçaların çizelgelenmesi ve iş istasyonlarındaki kontrol edilebilir olan işlem sürelerinin belirlenmesi için yöntemler geliştirilmiştir.
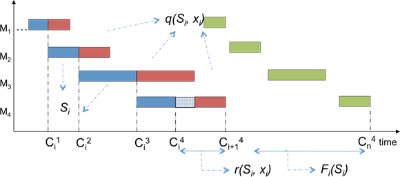
Problemlerin matematiksel modelleri geliştirilmiş ve bazı analitik çözümlere ulaşılmıştır. Makine sayısı arttıkça problemin karmaşıklığı arttığı için, matematiksel modellerin CPLEX gibi çözücülerle çözülmesi çok uzun olduğu durumlar için sezgisel metotlar geliştirilmiş ve çözüm kaliteleri yapılan kapsamlı testlerle incelenmiştir.
Projede iki yüksek lisans öğrencisi bursiyer olarak görev almış ve tezlerini çalıştıkları konulardan yazmışlardır.
Tek ve Çift Tutuculu Malzeme Taşıyıcı Robotlu Akış Atölyelerinde Hat Dengeleme TÜBİTAK 1001, 213M435, 2014-2016, 126.800TL
Bu çalışmada tek veya çift tutuculu robotların kullanıldığı robotik hücrelerin tasarımı problemi ele alınmıştır. Ele alınan sistemde parçalar makinelerde işlenirken, makineler arası parça transferi ve makinelerin yüklenmesi ve boşaltılması ise sistemdeki tek bir robot tarafından yapılmaktadır. Üretilecek her parçanın sistemdeki makinelerde işlenmek üzere belirli sayıda işlemi bulunmaktadır. Aralarında öncelik ilişkileri bulunan bu işlemler belirlenen bir hedef çıktı miktarını sağlamak üzere ve kullanılacak makine sayısını en küçükleyecek biçimde makinelere atanacaktır. Tek tutuculu robotlar aynı anda üzerlerinde tek bir parça bulundurabilirken, çift tutuculu robotlar iki parça bulundurabilmektedir.
Planlama hiyerarşisinde üst basamaklarda yer alan montaj hattı dengeleme problemleri üzerine 1950lerden başlanarak çok fazla sayıda çalışma yapılmıştır. Fakat hiçbirisinde bu tip bir robotik hücre ele alınmamıştır. Diğer taraftan, 1990lardan itibaren yoğun bir şekilde çalışılan robotik hücre çizelgeleme literatürü de probleme operasyonel seviyeden yaklaşmakta, hat tasarımıyla ilgilenmeyerek robot hareketlerinin çizelgelenmesi konusunu ele almaktadır. Bu çalışmada ise bu iki alan birleştirilmekte ve önemli bir boşluk doldurulmaktadır.
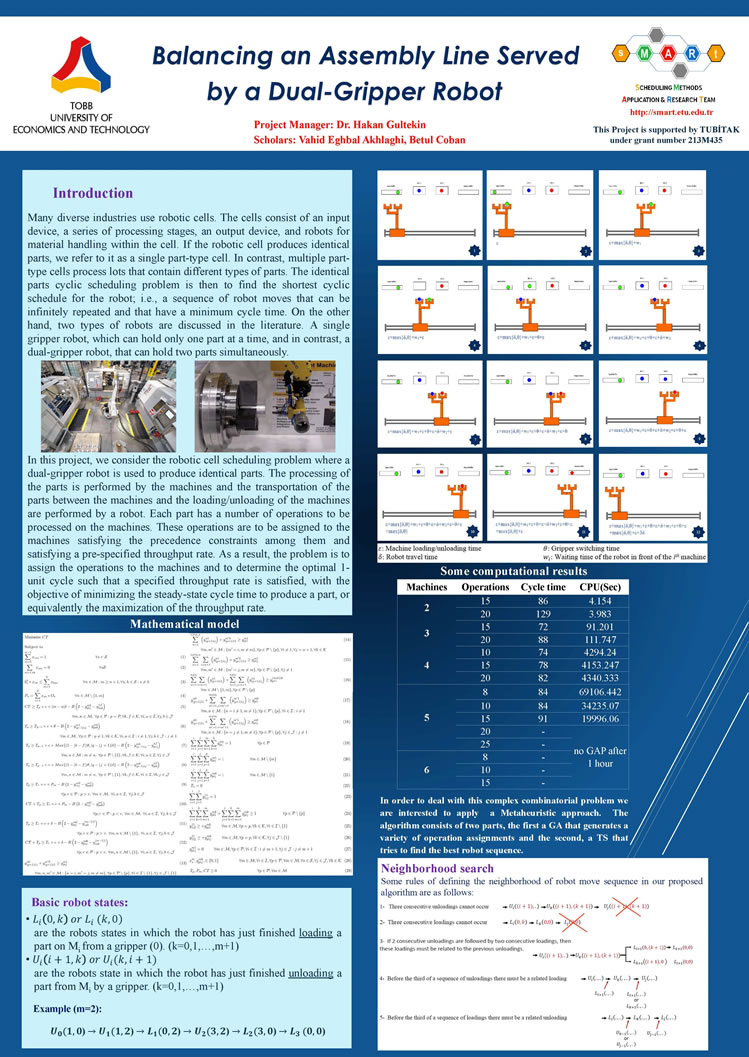 Çalışmada öncelikle tek tutuculu robotlu sistemler ele alınmış, kesin çözüm için matematiksel modelleme tabanlı yöntemler geliştirilmiştir. Fakat, NP-Zor olan bu problem için, özellikle problem boyutu büyüdüğünde matematiksel modellerle çözüm elde edilemeyeceğinden sezgisel algoritmalar geliştirilmiştir. Sonrasında çift tutuculu sistemler için de matematiksel modeller ve sezgisel algoritmalar geliştirilmiştir. Geliştirilen matematiksel modellerin ve sezgisellerin doğrulama ve geçerleme çalışmalarının yanında kapsamalı deneysel çalışmalarla performans testleri yapılmıştır.
Çalışmada öncelikle tek tutuculu robotlu sistemler ele alınmış, kesin çözüm için matematiksel modelleme tabanlı yöntemler geliştirilmiştir. Fakat, NP-Zor olan bu problem için, özellikle problem boyutu büyüdüğünde matematiksel modellerle çözüm elde edilemeyeceğinden sezgisel algoritmalar geliştirilmiştir. Sonrasında çift tutuculu sistemler için de matematiksel modeller ve sezgisel algoritmalar geliştirilmiştir. Geliştirilen matematiksel modellerin ve sezgisellerin doğrulama ve geçerleme çalışmalarının yanında kapsamalı deneysel çalışmalarla performans testleri yapılmıştır.
Son olarak, daha maliyetli olan fakat üretim hızını artırma kapasitesi daha yüksek olan çift tutuculu robotların hangi durumlarda tek tutuculu robotlara göre daha avantajlı olduğunu saptamak ve bu sonucun parametrelere ne kadar duyarlı olduğunu belirlemek üzere kapsamlı parametrik analizler yapılmıştır.
Çalışmanın sonuçları hem montaj hattı dengeleme ve robotik hücre çizelgeleme alanında çalışan araştırmacılar tarafından ve hem de bu tip sistemleri kullanan veya kullanmayı düşüne firmalar veya bu firmalara bu tip sistemlerin satışını ve kurulumunu yapan firmalar tarafından kullanılabilecektir. Projede iki yüksek lisans öğrencisi bursiyer olarak görev almış ve tezlerini çalıştıkları konulardan yazmışlardır.
Yeşil Robotik Hücre Çizelgeleme, TÜBİTAK 1001, 215M845, 2016-2018, 243.750TL
Bu çalışmada da yine belirli sayıda makine ve bu makinelere hizmet veren bir malzeme elleçleme robotundan oluşan bir robotik hücre ele alınmıştır. Literatürde bu alanda yapılan çalışmaların neredeyse tamamı üretim hızının maksimize edilmesini tek amaç olarak ele almaktadır. Bu çalışmalarda robot hareketlerinin çizelgelenmesi ve farklı tip parça üretiliyorsa parça üretim sıralamasının belirlenmesi bu amaca ulaşmak için verilmesi gereken kararlardır. Bu alandaki çalışmaların tamamında robotun yaptığı bütün hareketleri mümkün olan en yüksek hızda gerçekleştirdiği varsayılmaktadır. Dolayısıyla robot hareketleriyle ilgili süreler sabit birer problem parametresidir. Halbuki hareketlerin en yüksek hızda yapılması bazı anlarda robotun bir sonraki hareket başlayana kadar boşta beklemesine sebep olmaktadır. Robotların harcadıkları enerji miktarı hız, ivmelenme, taşınan yükün ağırlığı gibi faktörlere bağlıdır. Hız ve ivmelenme gibi parametreler değiştirilerek harcanan enerji miktarı kontrol edilebilir. Robotlara benzer şekilde sistemdeki makinelerin çalışma hızları da literatürde sabit kabul edilmektedir. Bu parametrelerin birer karar değişkeni olması üretim hızının yanında, sistemde harcanan enerjinin de optimize edilmesini sağlayarak sistemden maksimum faydanın elde edilmesini sağlayacaktır.
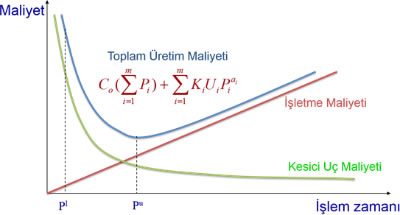 Bu projede optimal robot hareket sıralaması ve robot ve makinelerin optimal çalışma parametrelerinin belirlenmesi hedeflenmektedir. Üretim hızı maksimizasyonu ve enerji tüketimi minimizasyonu beraberce ele alınacaktır. Dolayısıyla 2-kriterli bir optimizasyon modeli kurulacaktır. Bu iki kriter birbirleriyle çeliştiği için tek bir optimal çözüm yerine başatlanmayan (etkin, nondominated) çözümler kümesi belirlenecektir.
Bu projede optimal robot hareket sıralaması ve robot ve makinelerin optimal çalışma parametrelerinin belirlenmesi hedeflenmektedir. Üretim hızı maksimizasyonu ve enerji tüketimi minimizasyonu beraberce ele alınacaktır. Dolayısıyla 2-kriterli bir optimizasyon modeli kurulacaktır. Bu iki kriter birbirleriyle çeliştiği için tek bir optimal çözüm yerine başatlanmayan (etkin, nondominated) çözümler kümesi belirlenecektir.
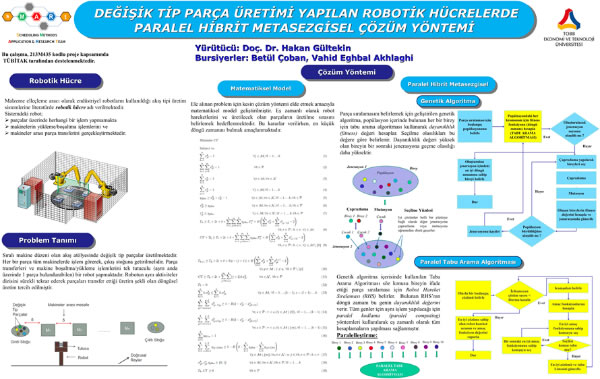
Çalışmada pratikte ve literatürde en sık rastlanan hücre konfigürasyonları ele alınacaktır: Görece olarak basitten daha karmaşığa doğru ele alınacak bu problemler; i) Tek tip parça üreten tek tutuculu sistemler; ii) Tek tip parça üreten çift tutuculu sistemler ve iii) Farklı tip parça üreten tek tutuculu sistemlerdir. Farklı tip parça üreten sistemlerde önceki kararlara ek olarak parça üretim sıralamasının da belirlenmesi gerekmektedir.
Projede bir yüksek lisans ve bir doktora öğrencisi çalışacak ve yapılan çalışmalar bu öğrencilerin tezlerini oluşturacaktır.